Вращаются-то они в одном направлении и синхронно, как одно целое.
[highlight]Это твои представления как "идеальный газ" для него есть законы , но он несуществует [/highlight]. Добавь в свою картину дополнительные условия :
1 Зазоры между поверхностями ,
2 Собственные частоты колебаний у каждой детали
3 Смешение вибраций различных гармоник от различных возмущающих сил .
4 Упругие деформации лонжерона , хаббара и поводка , а значит и перемещения точек поверхностей и изминение геометрии узла .
[highlight]Согласен.[/highlight]
Теперь дальше:
🙂
1 Если ты о всевозможных контактных поверхностях, то их нужно подробнейшим образом рассматривать каждую в отдельности.
Но мы же сейчас "говорим" об, именно, "ТРЕНИИ ПАЛЬЦА О СТЕНКИ ОТВЕРСТИЯ".
Правильно?
Если зазоры будут присутствовать (а они присутствовать будут), то в идиале трения ни какого не будет.
Правильно?
Возможные лёгкие и редкие соударения этих поверхностей от возможно проскакивающих вибраций
в расчёт брать - не серьёзно.
Более-менее существенных нагрузок в общую картину сил трения в осевом направлении эти соударения не внесут.
По этому, в расчёт их брать не будем.
2 Опять это в общем рассматривать нельзя.
Потому как, вибрация каждого в отдельности элемента конструкции втулки вносит свою какую-то «нотку» в симфонию, исполняемую всей несущей системы в частности, и всем аппаратом - в целом.
А мы рассматриваем только сотрудничество «Направляющего пальца» и его «Направленного отверстие».
Ни палец, ни диск венца ощутимо вибрировать не должны.
Тем более, что и палец, и диск венца – это практически одно целое.
И какие-то вибрирующие движения смогут возникнуть только при появлении довольно серьёзной выработка на поверхностях контактной пары
«СТУПИЦА УПРАВЛЯЮЩЕГО ДИСКА» : «НИЖНИЙ СТАКАН ступицы венца»
Кстати, наличие в этой паре шлицов от проблем, появляющихся при выработке поверхностей
НЕ ИЗБАВЯТ.
3 Это ты, чё-то, конечно, загнул.
В смысле, пальцы в веере.
Я оценил.
Так как, к направляющим палцам и дыркам это, снова, отношение имеет нуОООченьповерхностное.
4 Тут не спорю.
Но …
Линейные значения упругих деформаций ХАББАРА и ПОВОДКОВ до такой степени ничтожны, что на эти деформации
внимания можно не обращать ВООБЩЕ.
Остаётся лопасть.
Вот она-то деформируется с, конкретно, довольно заметными значениями.
Но раз ХАББАР практически не деформируется, то деформации лопасти ни чего
(в картине «перемещения точек поверхностей и изминения геометрии узла» )
, практически, изменить не смогут вообще.
А уж тем более, силу, прижимающую стенки направляющих пальцев к стенкам отверстий
НЕ УВЕЛИЧАТ однозначно.
Вывод:
Для начала вспомним с чего началось.
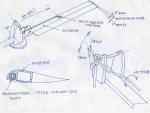
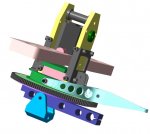
Понимаешь Слава , шлиц воспринимает усилия возникающие в плоскости вращения ротора и при его наличии между венцом раскрутки и пальцем идущим к поводку можно сделать гарантированный зазор [highlight]и уйти от трения в этом месте [/highlight].
В базе «поверхность направляющих пальцев» ни какого трения возникнуть не может.
По этому, о присутствии между «стаканом» и управляющим диском двух БАЗ «говорить» нельзя.
А вот в БАЗЕ «поверхность стакана» трение будет присутствовать гарантированно.
Во всяком случае превые 100…450 возвратно-поступательных движения.
А дальше, если ни смазка, ни чистота обработки поверхности контактной пары не будут препятствовать, то появится зазор и тогда диск начнёт потихоньку бить об стакан и разобьёт это до неприличных значений.
А биение в этом месте приведёт к появлению неуправляемых, стабилизированных по направлениям действия, циклических изменений угла установки лопастей.
И с каждым десятком тысяч оборотов ротора интервал, в котором будет циклически изменяться угол установки лопастей, будет увеличиваться.
Вот это и есть негативные последствия от присутствия люфта в основной и единственной «БАЗЕ».
Теперь снова о трении.
Это трение не есть «капут».
Оно же в этой базе будет демпфирующим фактором.
А это есть «гут».
P.S. Вова, извини меня за моё многословие.
Вроде, я ни чем не оскорбил и не обидел. :-[