обратный ход лопастей связан с неточной настройкой синхронизатора. Его скорее всего можно избежать уменьшением радиуса эксцентриситета мотылевой шейки
Согласен.
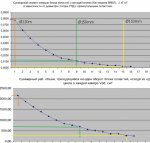
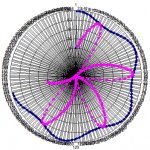
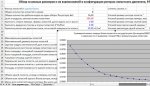
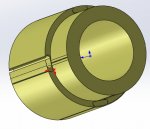
Если уменьшать амплитуду "мотыляния" [~18,4мм] эксцентрика по сравнению с константным радиусом водила [~69мм] трехлепестника, на котором "сидит" эксцентрик, то можно избежать попятных движений лопастей, сократив диапазон изменения эффективного радиуса у водила блока лопастей [см. нижний рисунок].
Одновременно, на мой взгляд, придется для сохранения степени сжатия неизменной [при уменьшенном эксцентриситете эксцентрика],
- увеличивать искусственно "угол раскрыва лопасти", как выражается Михаил Павлович, - то есть секторный размер отдельной лопасти.
Следствием будет:
- уменьшение полезного объема межлопастных камер (приращение секторного угла лопасти - одновременно декременирует остающиеся углы между лопастями),
- искусственное завышение массивности и инерционности блоков лопастей,
- и... снижение потенциала наращивания высокооборотности РЛД
- как за счет вынужденного увеличения размеров статора РЛД (чтоб сохранить рабочий объем на уровне расчетного)-
- это означает рост веса РЛД в кубической зависимости от коэффициента повышения линейного размера,
- что в свою очередь повысит инерционные силы
- и еще раз снизит потенциал виртуальный - повышение оборотности/мощности при прежнем весе...
Как Вы думаете, может быть лучше попытаться сделать "пятящиеся слегка" лопасти - максимально облегченными - но смириться с возрастанием инерционных нагрузок на них...
Где-то эти две тенденции - облегчение лопастей и их прочность - однозначно сойдутся...
Главное, чтобы они сошлись ... еще при нашей жизни!!
🙂