Почему? Больше заказов больше - больше бабосов. Моллер на аэромобилях столько бабла срубил, что Вам и не снилось, не стесняйтесь, продолжайте продавать, всё будет тип-топ. Успехов!заказы больше не принимаем,
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нем неправильно.
Необходимо обновить браузер или попробовать использовать другой.
Необходимо обновить браузер или попробовать использовать другой.
Самолет-амфибия Ursa Major.
erisky
Я люблю строить самолеты!
- Откуда
- г.Оренбург
Что-то центровка, на мой взгляд, слишком задняя вырисовывается.
VladimirK72
Я люблю строить самолеты!
- Откуда
- Тюмень
Особенно с снегоходом в хвосте 🙂
@ Tommy Versatty писал:
Не смотря на текущие проблемы с электроникой для Renesis 13B, движки менять не будем. Проблемы будем решать, а не бегать от них."
Игорь, думаю РПД придется скорее всего заменить. Советую поставить «Вальтеры» М337, меньше будет проблем с сертификацией, дешевле «Лайков» и лоб меньше.
Не смотря на текущие проблемы с электроникой для Renesis 13B, движки менять не будем. Проблемы будем решать, а не бегать от них."
Игорь, думаю РПД придется скорее всего заменить. Советую поставить «Вальтеры» М337, меньше будет проблем с сертификацией, дешевле «Лайков» и лоб меньше.
Tommy Versatty
Я люблю строить самолеты!
- Откуда
- Планета Земля
Вот блин... У верстальщика видимо тройка по инглишу была ;D, а мы и не заметили, спасибо за конструктивное замечание, исправим.книжке наверное лучше исправить название комплектации "Trevel" на "Travel"
Нужно сначала освоить те деньги, что получили, дальше будет видно. Не смотря на то, что инвестиции венчурные, лучше проявить осторожность, не помешает. Цель проекта не денег срубить, а построить самый лучший самолет.Почему? Больше заказов больше - больше бабосов. Моллер на аэромобилях столько бабла срубил, что Вам и не снилось, не стесняйтесь, продолжайте продавать, всё будет тип-топ. Успехов!заказы больше не принимаем,
Это только на первый взгляд так. Я тоже по началу так думал, но когда вникаешь в конструкцию все становится на свои места, картинки не дают полного понимания.Что-то центровка, на мой взгляд, слишком задняя вырисовывается.
Tommy Versatty
Я люблю строить самолеты!
- Откуда
- Планета Земля
Василий Андреевич приветствую! Установка Вальтеров - это план "В", хочу все-таки ванкели... Мы когда Renesis запустили, я прослезился - вибрации вообще нет, работает как электро. В настоящее время проблема в контроллерах, либо ставить комплекс с двумя датчиками вала (один видит круг, второй считает "гребенку"), при этом получается такой колхоз, что страшно рассказывать, либо с одним датчиком, который видит все, но тогда придется ставить электронный дроссель, который крайне ненадежен. Вот и зашли в тупик...Игорь, думаю РПД придется скорее всего заменить. Советую поставить «Вальтеры» М337, меньше будет проблем с сертификацией, дешевле «Лайков» и лоб меньше.
Компания Haltech подрядилась сделать контроллер нужный, но все это будет не быстро. Если Haltech не сможет поставить вовремя контроллеры, то установим Вальтеры.
Саша вообще говорит, что нужно купить у Виноградова и поставить новые конверсии Subaru EZ-30 и не париться, дешево и сердито. В общем вариантов масса, но я хочу Ванкели...
PS Вы бы хоть приехали в гости, а то мы общаемся как будто живем на разных континентах 🙂
Цель проекта не денег срубить,
а построить самый лучший самолет.
-тогда прийдётся Вам проститься с классикой и нацепить
крыло Каспэрра!=
http://koendu.pl/doc/KASPAIR%20200%20Preliminary%20Specifications.pdf
=\злостная шютка стариков!\
Tommy Versatty
Я люблю строить самолеты!
- Откуда
- Планета Земля
Да я бы с радостью, но это невозможно сделать только по одной причине - Вы, Генрих Петрович живете далеко от нас 🙂.-тогда прийдётся Вам проститься с классикой и нацепить
крыло Каспэрра!=
По классике то руководителя проекта найти было очень сложно, а по Касперу кроме Вас спецов я не знаю...
fastmak
Я люблю строить и летать!
- Откуда
- Екатеринбург
Посмотрите в сторону ECU других разработчиков, свет клином на халтече ведь не сошёлся. Специально разработанный это хорошо, но наверно дорого и долго.Электронный дроссель убираете и ставите механический например такой http://www.rotary-works.com/mm5/merchant.mvc?Screen=PROD&Store_Code=rotaryworks&Product_Code=RW-TB-RX8&Category_Code=THBD а мозги любые работающие с одним датчиком по одной гребёнке.Например вот здесь посмотрите http://fullfunctioneng.com/products/se3p-03-rx8/В настоящее время проблема в контроллерах, либо ставить комплекс с двумя датчиками вала (один видит круг, второй считает "гребенку"), при этом получается такой колхоз, что страшно рассказывать, либо с одним датчиком, который видит все, но тогда придется ставить электронный дроссель, который крайне ненадежен. Вот и зашли в тупик...
Компания Haltech подрядилась сделать контроллер нужный, но все это будет не быстро. Если Haltech не сможет поставить вовремя контроллеры, то установим Вальтеры.
Tommy Versatty
Я люблю строить самолеты!
- Откуда
- Планета Земля
Специально разработанный не дорого, но долго.Посмотрите в сторону ECU других разработчиков, свет клином на халтече ведь не сошёлся. Специально разработанный это хорошо, но наверно дорого и долго.Электронный дроссель убираете и ставите механический например такой http://www.rotary-works.com/mm5/merchant.mvc?Screen=PROD&Store_Code=rotaryworks&Product_Code=RW-TB-RX8&Category_Code=THBD а мозги любые работающие с одним датчиком по одной гребёнке.Например вот здесь посмотрите http://fullfunctioneng.com/products/se3p-03-rx8/В настоящее время проблема в контроллерах, либо ставить комплекс с двумя датчиками вала (один видит круг, второй считает "гребенку"), при этом получается такой колхоз, что страшно рассказывать, либо с одним датчиком, который видит все, но тогда придется ставить электронный дроссель, который крайне ненадежен. Вот и зашли в тупик...
Компания Haltech подрядилась сделать контроллер нужный, но все это будет не быстро. Если Haltech не сможет поставить вовремя контроллеры, то установим Вальтеры.
С дросселем проблема в том, что на него нужно установить датчик положения, а кастомовые варианты это 100% механика, которая работает с мапом. Мы пробовали на чистой механике с мапом, но все это не совсем то, что нужно, бензин рекой, диапазон крейсерских оборотов не тот, что нужен. Для дрэгрейсинга самое оно, но не для авиации.
На Халтече свет клином сошелся потому, что данный контроллер поддерживает функцию дублирования, что в авиации аксиома, плюс топливные карты сочинять не надо, все настройки в открытом доступе. Пытались купить электронику у Мистраля, но она стоит столько, что дешевле поставить на самолеты Лайкоминги...
Если Вы знаете электронику Ренесиса - пишите в личку Ваш телефон, мы любой помощи рады.
По классике то руководителя проекта найти было очень сложно, а по Касперу
-вот,что могут старики!=
http://www.homebuiltairplanes.com/forums/attachments/hangar-flying/22396d1360408975-brand-midfuselage-pusher-who-knows-more-004.jpg
http://www.homebuiltairplanes.com/forums/attachments/hangar-flying/21761d1355362642-brand-midfuselage-pusher-who-knows-more-rolfsandor_wide_image_ia043025_105608.jpg
-но считайте мои постики просто дружеским шаржём!
\ндравится Ваш АМФИБИЙ !!!\
fastmak
Я люблю строить и летать!
- Откуда
- Екатеринбург
А вы собираетесь оставлять MAF? С МАПом ведь лучше...сразу высотная коррекция. По дублированию согласен, а вот по топливным картам не вижу трудностей. Хороший настройщик на стенде вам эти карты напишет под ваши режимы и с вашими запросами по расходу(и никаких бензиновых рек). Не смотрели на этом сайте ECU http://www.rotaryaviation.com/Aviation_Prod.htm вроде чисто под авиацию(с дублированием) и с монитором?. И на этом http://www.flyrotary.com/ посмотрите на каких ECU летают на роторах.Я по электрике на RX-7 соображаю, по коммутации и т.п., а настройщика сам с Самары вызывал. Поставил на свою рыксу http://www.electromotive-inc.com/products/tec3r.phpСпециально разработанный не дорого, но долго.
С дросселем проблема в том, что на него нужно установить датчик положения, а кастомовые варианты это 100% механика, которая работает с мапом. Мы пробовали на чистой механике с мапом, но все это не совсем то, что нужно, бензин рекой, диапазон крейсерских оборотов не тот, что нужен. Для дрэгрейсинга самое оно, но не для авиации.
На Халтече свет клином сошелся потому, что данный контроллер поддерживает функцию дублирования, что в авиации аксиома, плюс топливные карты сочинять не надо, все настройки в открытом доступе. Пытались купить электронику у Мистраля, но она стоит столько, что дешевле поставить на самолеты Лайкоминги...
Если Вы знаете электронику Ренесиса - пишите в личку Ваш телефон, мы любой помощи рады.
i6vara
ночь ..полёт в некуда................
- Откуда
- красная поляна
он мне напоминает летающую платформу ....где испытывать собираетесь ?...
уважаю рисковых людей 😎
уважаю рисковых людей 😎
Tommy Versatty
Я люблю строить самолеты!
- Откуда
- Планета Земля
Если бы было все так просто... Я не знаю как у Вас в городе, но у нас настройщиков с "черным поясом" по рыксам нет, Приходится вызывать Алексея Никонова из Уфы, он единственный знакомый мне гуру по рыксам, а у него работы столько, что по первому требованию он вряд ли приедет.по топливным картам не вижу трудностей. Хороший настройщик на стенде вам эти карты напишет под ваши режимы и с вашими запросами по расходу(и никаких бензиновых рек)
В общем сложные задачи есть и мы их решаем. Всему свое время. :IMHO
казак
Строю трансформер
- Откуда
- г.Волгоград
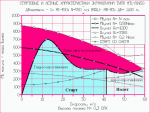
@ Tommy Versatty ведь @ henryk не просто так вам намекнул на крыло Каспера, речь идёт о нетрадиционных приёмах увеличения подъёмной силы ! У вас в проекте широкофюзеляжная гидролодка. которая при старте с воды требует соответствующей мощности преодоления горба сопротивлений (в приложении примерный график ), установка 4-х двигателей возможно и решит задачу, но не полностью и к тому же проект получает дополнительные огромные сложности по реализации..Нужно будет создавать подъёмную силу как можно раньше на меньшей скорости. Вода очень жёсткая и чаще всего(ветер волны) неровная поверхность, и представить конструкцию с 4-мя двигателями как у Ан-12 на несущих крыльях без подкосов, как они у вас на кртинке нарисованы , просто нереально. Крылья могут быть, скорей всего, металлической конструкции ,или смешаной и очень тяжелые (чисто пластиковые ,думаю,не покатят, будут просто не реально тяжелые ) . При такой компоновке и с таким крылом как у вас, отрыв будет происходить на большой скорости, а это увеличивающиеся в разы с увеличением скорости отрыва нагрузки на конструкцию . Мне кажется вам нужно присмотреться именно к нетрадиционным решениям,что бы уменьшить скорость отрыва , например использование эффекта Кастера, аэродинамической разгрузки фюзеляжа и организации экранного эффекта и конечно же в том числе и крыла Каспера.. И самое главное - компоновка должна быть направлена в первую очередь на использование полезных свойств среды для снижения веса конструкции , тогда проект будет реализован и успешным..
Вложения
Tommy Versatty
Я люблю строить самолеты!
- Откуда
- Планета Земля
Кто здесь?! :🙂просто нереально
Тримараны с вихревым реданированием преодолевают "горб сопротивления" на малых скоростях, при которых крыло еще не несет. При испытаниях корпуса суммарный вес лодка+загрузка = 1500кг, толкал всю эту массу двухтактный старичок Тохатсу 50л.с., скорость выхода на режим глиссирования примерно 30 км/ч, максималка примерно 50 км/ч. Точных цифр не помню, искать лень, в этой ветке я их выкладывал как и видео испытаний.У вас в проекте широкофюзеляжная гидролодка. которая при старте с воды требует соответствующей мощности преодоления горба сопротивлений
Сначала сделайте что-то похожее по характеристикам, а потом скажете, что это не реально.
Вопросы еще есть? 🙂
Кстати, Вы "Вжика" вашего облетали?
казак
Строю трансформер
- Откуда
- г.Волгоград
Кстати, пока нетКстати, Вы "Вжика" вашего облетали?
Насколько мне известно, много двигателей на самолёт ставили потому, что не было одного (двух) двигателей необходимой мощности. Вместо четырех, вполне можно поставить два.
У авторов заявлены амбиции на самый лучший самолёт. А опыт постройки хорошего есть? Об этом я ничего не нашёл. Или пропустил
У авторов заявлены амбиции на самый лучший самолёт. А опыт постройки хорошего есть? Об этом я ничего не нашёл. Или пропустил
Vladimir1950
Я люблю строить самолеты!
Проект конечно амбициозный, очень трудозатратный и непредсказуемый в коммерческом плане. Как спорные вопросы-большие размеры, 4 двигателя, не видно амфибийности, высокая цена (в будущем). Для приема на берегу нужна целая команда для разворота хвостом к берегу . При волнении и ветре-просто невозможно. Для даже текущего и предполетного обслуживания нужны оснастка, пирс, ГПМ и пр. О эксплуатации в труднодоступных местах речи нет. Как решен вопрос с центровкой при загрузке скутера в хвост? Это ведь не одна сотня кг далеко от ЦТ. Да и на хрена он нужен, просто понты? Про эстетику не говорим-дело вкуса каждого. Все таки Каталина-образец изящного инженерного решения амфибии, хотя ныне чисто внешне надо бы подредактировать. А вообще, конечно успехов Вам. Повезло со спонсором, немногие сегодня решаются в авиацию вкладывать, больше её уничтожают руками нерадьковщинской опричины.
Я так думаю что когда подойдёт время к постройке,если подойдёт,первого лётного экземпляра, то с рисунками в первых постах у него будет общее только название САМОЛЁТ-АМФИБИЯ URSA MAJOR.А в небо подымется абсолютно другая машина и по форме и по содержанию.И в качестве двигателей будут не четыре поршня а два ТВД,коих под такой размер сейчас появляется велико множество.Главное не затягивать, а то завтра послезавтра обещают антигравитацию на поток поставить. 🙂
Similar threads
- Ответы
- 6
- Просмотры
- 3070
- Ответы
- 12
- Просмотры
- 6353
- Ответы
- 1
- Просмотры
- 1777
Поделиться: