S
slavka33bis
Скорее всего, изображения контуров профиля лопастей, повторяет реальный.kyava сказал(а):но я думаю там не совсем симметричный профилиь, а близкий к нему
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Скорее всего, изображения контуров профиля лопастей, повторяет реальный.kyava сказал(а):но я думаю там не совсем симметричный профилиь, а близкий к нему
Это конечно не плохо,kyava сказал(а):Что Борис и доказал.slavka33bis сказал(а):Ведь, и ротор с лёгкими лопастями тоже способен создать прыжковую тягу.
Его разбег на взлете был 3 !!! метра с лопастями DW. :~)
Даже если у лопастей момент их инерции будет в десять раз больше "Картеровских", с углом установки лопастей в +4 градуса и с окружной скоростью концов лопастей, даже, 1,1 Маха ротор не сможет создать тягу, даже, 0,5 от взлётного веса.kyava сказал(а):E = MC*slavka33bis сказал(а):Нет Андрей, не моментом инерции, а оборотами ротора.
А_А_А_А_А?kyava сказал(а):А книжка А. Жаброва лежит здесь:
Скорее всего, ятакдумаю, НЕТ.kyava сказал(а):P.S. Придется тебе, Вячеслав, расстаться со своим монитором
slavka33bis сказал(а):1000 кг.
Это к АБМ-у.JAKONYA сказал(а):Вопросик есть -
Ктонить просчитывал оптимально допустимый весовой интервал
роторов для автожиров ???
Поддерживаю.JAKONYA сказал(а):Тяжолый ротор плохо ходит оборотами реагируя на изменяющиеся условия в процессе полета и на переходных режимах.
При огромном желании и немалом мастерстве пилота (и конечно сам аппарат должен быть тоже готов)kyava сказал(а):Автожир испытывает прегрузки до [highlight]3-х[/highlight] g
Давай перейдём.kyava сказал(а):Теперь переходим к главному.
kyava сказал(а):Если ротор при 400 об/мин держит ТРИ (3) веса аппарата, то почему при тех же условиях он не может оторвать его от земли
slavka33bis сказал(а):Завтра можешь ознакомиться с результатами моих расчётов.
И тогда продолжим.
slavka33bis сказал(а):тяга не приблизится, даже, и
к двумстам килограммов.
Славка, а где можно ознакомиться с кратким содержанием? ;Dslavka33bis сказал(а):180 и 181 посты - очень сильный ход.
Серьёзно.
Как только я въехал, о чём идёт речь, мой пищеварительных тракт отреагировал лёгкой изжогой, предвкушая знакомство с пластиками (разного рода),
металлами (разных составов)
и стекла (различной степени прозрачности)
в качестве пищи.
Да и челюсть слегка повело.
Зубки-то уже не те, что раньше.
Я уже и молоточек с постаментом мысленно стал готовить.
И придумал, у кого взять видеокамеру.
И мониторчик, который должен быть следующим, у же знаю где прикупить.
И ...
Как вдруг ...
О чудо.
Пришла в голову спасительная мысль.
Я её щас "озвучу", а ты Андрей после этого выложешь название и автора той книги, из которой ты выписал цитаты.
Я спросил себе:- "А как бы ты Вячеслав поступил на месте авторов тех аппаратов?"
Ведь не реально же пытаться взлететь строго вертикально имея
- полётный шаг лопастей;
- и предпрыжковые обороты ротора, пусть даже и в 2...2,5 раза больше, чем полётные.
И сам себе ответил.
Каким-то макаром (раз пилот в управление ОШ ротора не вмешивается) должно получиться так, чтобы лопасти в момент снятия крутьмомента с ротора увеличили свои углы установки до необходимого значение.
А это, как минимум, 8...12 градусов.
Ну ни как не 3...4 градуса.
Втулка динамическая уже есть.
Раз она уже работает, уменьшая ОШ лопастей ротора при подведении к нему крутьмомента.
А чёбы ей не увеличить углы то требуемых САМОСТОЯТЕЛЬНО?
Вертикальный шарнир мы (не "мы", конечно, а "ОНИ") уже наклонили, в следствии чего
Наша лопасть при отставании угол установки уменьшает,
а при опережении этот угол уже увеличивается.
ПрАААльно?
А чёбы нам, в добавок, этот ВШ ещё и не сдвинуть в поперечном направлении в нужную сторону в плоскости вращения ротора?
В результате этой манипуляции мы получим уже второй отклик лопасти, теперь уже на центробежную силу (а центробежная сила, у нас, зависит от оборотов ротора.)
Динамическая втулка – это же, конкретно, «автоматика».
Только не электрическая (или какая-нибудь ещё), а чисто механическая.
Теперь ещё раз, только уже коротко.
Как она работает.
Первый канал:
-- от положения лопасти в плоскости вращения изменяется угол её установки.
Второй канал:
-- от значения центробежной силы зависит положение лопасти в плоскости вращения.
При отсутствии крутьмомента, при увеличении «цбс» лопасть стремится переместиться вперёд по вращению (то есть, опережает),
а при умен6ьшении «цбс» - назад по вращению (то есть, отстаёт).
Результат работы такой втулки:
При подведении крутьмомента лопасть отстаёт от своего полётного положения и от этого уменьшается угол её установки.
Ротор спокойно раскручивается.
При снятии крутьмомента и под воздействием «цбс» (которое гораздо больше полётного) лопасть перемещается вперёд гораздо дальше, чем при полётных оборотах.
В результате такого значительного опережения лопасть увеличивает свой угол установки до значения, гораздо большего, чем полётный угол.
Ротор начинает создавать тягу, гораздо больше, чем вес аппарата.
Аппарат взлетает вертикально.
А обороты неминуемо начинают падать.
От падения оборотов лопасть начинает перемещаться назад.
И постепенно приближается к своему полётному положению.
А раз лопасть перемещается назад, угол её установки постепенно уменьшается, приближаясь к своему полётному значению.
Эта механическая автоматика очень интересная штука.
Но у неё есть огромный минус.
Ротор с такого типа автоматикой ОООЧЕНЬ УСТОЙЧИВ ПО ОБОРОТАМ.
А это значит, что ротор при, допустим, увеличении нагрузки (вираж или, просто, взятие РУ на себя) не станет увеличивать свои обороты.
Он конечно попытается это сделать, но автоматика очень жёстко вернёт эти обороты в строгие рамки.
И из-за этого аппарат, оборудованный автодинамической втулкой не в состоянии выполнять виражи с довольно значительными перегрузками.
Увеличение нагрузки на ротор при вираже (но при постоянных оборотах ротора) чревато срывом потока с лопастей.
Что не минуемо приведёт к резкому снижению несущих способностей ротора.
И при этом, огромная часть лопасти, попавшая в зону срыва потока начнёт нехило тормозить вращение ротора.
В общем, видимо по этой причине эта «АВТОДИНАМИЧЕСКАЯ ВТУЛКА» не нашла своего развития.
И в наши дни, вроде, их тоже не наблюдается.
Эта втулка несет в себе ОПРЕДЕЛЯЮЩИЕ противоречия.
1) Для вертикального взлёта в прыжке она – что надо.
2) А в отношении уже полёта – эти качества меняют знак с «плюса» на конкретный «минус».
🙂 P.S. Надеюсь, с монитором расстоваться пока рановато.
P.P.S. Андрей, вот теперь можешь "сдать" мне эту книжку.
Я её почитать хочу. И найти подтверждение моей мысли.
AcroBatMan сказал(а):Чак Бити (Chuck Beaty) - наиболее уважаемый в США знаток теории и практики АЖ. К его мнению прислушиваются практически безоговорочно, а сам он регулярно делится своими знаниями, причем делает это без всяких эмоций по поводу незнания основ аэродинамики и конструкции летательных аппаратов большинством его собеседников. За что снискал всеобщее уважение.
Эта статья была опубликована в декабрьском выпуске журнала Pop Flying за 1971 год. Пер. - АВМ.
=========================
Flap, Flap, Flap…
Динамика ротора автожира и его реакции на движения органов управления не всегда хорошо понимаются пилотами-любителями и строителями автожиров. Несмотря на то, что большинство любителей понимают, что каждая лопасть должна иметь свободу перемещения в вертикальном направлении для уравновешивания подъемной силы в горизонтальном полете, мало кто из них может толково и подробно объяснить, что происходит с лопастью ротора в процессе полета.
Для целей нашего обсуждения примем следующие параметры нашего условного аппарата:
Полетный вес - 250 кг
Диаметр ротора - 7.0 м
Обороты ротора - 300 об/мин.
Хорда лопасти - 180 мм
Площадь лопасти (каждой) - 0.6 кв.м
В спокойном горизонтальном полете каждая лопасть должна создавать подъемную силу, равную половине полетного веса автожира, т.е. 125 кг. На скорости автожира 20 м/сек или 72 км/час наступающая лопасть имеет максимальную скорость относительно воздушного потока на 40 м/сек больше, чем в этот же момент имеет отступающая лопасть. Отсюда следует, что отступающая лопасть для сохранения равенства подъемной силы должна иметь больший угол атаки, чем наступающая.
[ch947] = (Cy x 10) : (0.5 x [ch961]в x V2 x Sл)
где:
[ch947] - угол атаки лопасти, град.
Cy - подъемная сила ротора (полетная масса автожира, кг)
[ch961]в - плотность воздуха
V - скорость набегающего воздушного потока, м/сек
Sл - площадь лопасти, кв.м
Для винтокрылых аппаратов принято считать, что среднее значение по свойствам элемента лопасти находится на расстоянии 70 % ее длины (т.е. радиуса ротора). Скорость воздушного потока на лопасти на расстоянии 0.7 от оси ротора для нашего случая будет равна:
V0.7 = (0.7 x Dr x [ch960] x n) : 60
Dr - диаметр ротора, м
n - обороты ротора , об/мин
или 0.7 х 7.0 х 3.14 х 300 / 60 = 76.93 м/сек - если бы не было движения аппарата вперед.
На скорости полета 20 м/сек скорость воздушного потока относительно наступающей лопасти будет на 20 м/сек больше, а на отступающей, соответственно - на 20 м/сек меньше. Т.е. скорость на наступающей лопасти равна 96.93 м/сек, а на отступающей - 56.93 м/сек.
Угол атаки наступающей лопасти будет равен
(125 х 10) : (0.5 х 0.00125 х 76.93 х 76.93 х 5) =
104.5 х 10__________________
0.5 х 0.0010442 х 96.93 х 0.480 = 2.5 градуса
Угол атаки отступающей лопасти будет равен
104.5 х 10____________________
0.5 х 0.0010442 х 73.63 х 0.465 = 6.5 градуса
Эти углы атаки являются наибольшим и наименьшим значением для каждой лопасти и достигаются в момент прохождения лопастями линии, перпендикулярной линии полета.
Разница в 4 градуса в значениях углов атаки становится возможной благодаря устройству втулки ротора, а именно - тому, что ротор может качаться во втулке.
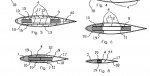
Если бы ручка управления могла переместиться в направлении качания втулки ротора на половину угла качания втулки, и при этом плоскость вращения ротора оставалась бы неизменной, то было бы выполнено условие равенства подъемной силы на каждой лопасти ротора. Наклон втулки ротора на 2 градуса вперед уменьшает на эту величину угол атаки наступающей лопасти и увеличивает угол атаки отступающей лопасти на эту же величину. Когда лопасть проходит через крайнее переднее положение, скорость воздушного потока относительно ее начинает уменьшаться и достигает минимального значения в тот момент, когда лопасть перпендикулярна направлению полета, после чего скорость воздушного потока относительно лопасти начинает увеличиваться и снова становится такой же, как в крайнем переднем положении, когда лопасть достигает крайнего заднего положения. Отступающая лопасть перемещается (машет) вниз и достигает низшего своего положения в крайней задней точке своего оборота. Наступающая лопасть находится в противоположных условиях, поэтому она перемещается (взмахивает) вверх, достигая верхней точки своего положения в крайнем переднем положении своего оборота. Эти перемещения лопасти вверх и вниз влияют на направление относительного воздушного потока относительно лопасти и, соответственно, изменяют угол атаки каждой лопасти (рис.1).
Рис.2 показывает, что в горизонтальном полете ось вращения законцовок лопастей не совпадает с осью вращения втулки ротора, а отклонена назад на угол, равный углу взмахивания. Это отклонение иногда называют "отдачей ротора". Наблюдатель, находящийся на оси вращения законцовок, будет видеть только изменение шага лопасти, но не увидит ее взмахов. Наблюдатель, находящийся на оси вращения втулки ротора, напротив, увидит взмахи лопасти, но не увидит изменение шага. Угол взмахивания и, соответственно, угол отклонения ротора, увеличиваются с увеличением веса аппарата, скорости полета, а также с уменьшением оборотов ротора и площади ометаемой.
Из явления взмахивания вытекают некоторые особенности управляемости винтокрылыми аппаратами. Так, при увеличении скорости полета, плоскость вращения законцовок лопастей ротора отклоняется больше назад и, если не парируется органами управления, вынуждает машину подниматься. Подъем, в свою очередь, уменьшает скорость, углы взмахивания и, соответственно, угол отклонения плоскости вращения назад, вынуждая машину снижаться, восстанавливая значение скорости. Здесь можно провести аналогию с крылом самолета, которое имеет угол колебаний по тангажу, управляемый прибором поддержания заданной скорости.
Отклонение плоскости вращения законцовок лопастей ротора назад вызывает также воздействие аэродинамических сил, действующих на роторе, на органы управления втулкой ротора. На АЖ бенсеновского типа используют два типа втулок - шпиндельную и смещенную. Общая тяга ротора действует по оси вращения законцовок и равна векторной сумме подъемной силы и сопротивления ротора, как показано на рис.2 и рис.3с. В случае со шпиндельной втулкой, скорость в 50 миль вызовет смещение линии вектора общей тяги ротора относительно центра сферического подшипника. Эта линия окажется впереди центра подшипника на 0.115 дюйма, что вызовет усилие на ручке в 52 фунта на дюйм (0.115 х 470). При эффективной длине ручки управления в 36 дюймов, на ручке появится усилие примерно в полтора фунта, направленное на отклонение ротора назад.
В случае со смещенной втулкой, имеющей смещение в один дюйм, линия вектора общей тяги ротора пройдет на 0.82 дюйма позади оси качания втулки по тангажу и создаст момент в 385 фунтов на дюйм (0.82 х 470). При той же эффективной длине ручки, что в первом примере, на ней появится усилие в 10.5 фунтов, но - в противоположном первому случаю направлении.
Интересно отметить, что усилия на ручке, вопреки распространенному мнению, не связаны непосредственно с сопротивлением ротора, а только с углом взмахивания и с тягой ротора. Увеличение сопротивления ротора со 100 до 200 фунтов связано с увеличением общей тяги ротора на 502 фунта. Это несколько увеличит обороты ротора, компенсируя возросшую нагрузку на лопасть, и углы взмахивания останутся практически теми же. Гораздо более существенные и очевидные изменения произойдут при увеличении сопротивления ротора, вызванном увеличением тангажа и (или) отклонением втулки ротора с помощью ручки управления в положение, близкое к заднему упору.
В этой статье были сделаны ряд упрощений, призванных сохранить математику в простейшем виде. Большинство поймут, что при расчете угла атаки лопасти следовало использовать общую тягу ротора вместо подъемной силы, и что разность скоростей несколько меньше за счет отклонения ротора. Менее очевидными является исключение некоторых условий, дающих большее увеличение углов взмаха с ростом скорости, чем показано в наших расчетах. Однако эти неточности не меняют результаты слишком сильно, и ошибка в расчете углов взмаха не превышает 1/2 градуса.
Другим упрощением является включение веса ротора в расчет усилий на ручке. При расчете подъемной силы и сопротивления ротора его вес должен быть исключен, что приведет к некоторому увеличению усилия на ручке в случае со шпиндельной втулкой и уменьшению усилия в случае со смещенной втулкой.
============================
Если при увеличении скорости полета,ротор стремится отклонится назад,то как производится тримирование ротора по скорости?slavka33bis сказал(а):Так, при увеличении скорости полета, плоскость вращения законцовок лопастей ротора отклоняется больше назад и, если не парируется органами управления, вынуждает машину подниматься.
Да, согласен. Но только в первый момент, пока ротор не встал на тот угол, который ему задал пилот. Дальше все происходит по совсем другим законам. Присутствует центробежный момент , следствие - увеличение массы, увеличение вертикальной скорости( относительна автожира ) , увеличение скорости воздушного потока, проходящего через ротор снизу вверх, увеличение горизонтальной составляющей, тянущей лопасть вперед, следствие - увеличение оборотов.slavka33bis сказал(а):А перегрузка - это следствие увеличения угла атаки ротора, а вместе с этим и угла атаки лопастей.
Это делают МАААленким электрическим домкратом, прицепленным к пружине. 🙂JAKONYA сказал(а):Чтобы увеличить (тримированую) скорость - делают больший преднатяг тримера.
Об этом всём по позжее.kyava сказал(а):Да, согласен. Но только . . .slavka33bis сказал(а):А перегрузка - это следствие увеличения угла атаки ротора, а вместе с этим и угла атаки лопастей.
. . .
. . .
Прокомментирую.kyava сказал(а):Я хочу узнать, кто нибудь запускал в детстве вертолетики с инерционного стартера(такая ручка с осью, на которой намотан шнур, а на оси сидит вертолетик ).
Дак вот, угол установки лопастей у них был постоянный и без всяких ОШ, ГШ и ВШ.
И , О ЧУДО , они все взлетали, вопреки всем расчетам SLAVKи !
Может [highlight]процетируешь[/highlight]?
Детские воспоминания САМЫЕ ЧЕТКИЕ , и поэтому , если кто-то вспомнит, то представит его во всем его многообразии, илим наоборпот.Так что основные параметры ротора расскажут ВСЕ! :IMHOslavka33bis сказал(а):А сейчас уже вспомнить некоторые из основных его параметров, естественно, не в состоянии.