Пропорциональное радиоуправление это когда отклонение управляемого элемента на приёмной стороне, пропорционально отклонению управляющего элемента (ручки) на передающей стороне.
И по скорости отклонения и по амплитуде.
Ну так автоприлот заменяет команды с ручки джойстика, все то же самое, только команду выдает не ручка джойстика, а гироскоп, и исключен приемо-передатчик, который к принципам пропорционального управления отношения не имеет.
В-общем я уже сказал - угол поворота вала сервы пропорционален величине входного сигнала, и не важно от джойстика он пришел, от приемника или от автопилота. Кстати, модельные автопилоты предусматривают взаимодействие автоматики с джойстиком, (2 режима), но это тема отдельного разговора.
Что же касается нашей задачи, то тут понадобится прогрессивная характеристика.
Иначе не будет эффективно гаситься начавшийся крен.
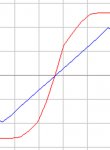
Ну я про это и толковал, я пытался спаять преобразователь с характеристикой усиления как на осцилограме, где синяя линия - перекладка крена, красная - парирующая реакция рулей.
Плюс к этому чувствительность меняется в зависимости от скорости изменения крена - от крутизны синей линии. Проще говоря, чем
резче кренение, тем
больше отклонение руля.
Жаль в цифровых технологиях профан, там эта задача решается гораздо проще, я же ваял аналоговый девайс.
Ладно, я эту лабуду думаю заставлю работать, зима длинная, хотя и прошлая длинная была :о) Ты меня пинай иногда, чтоб пыл не угасал :о)