Из сообщения №зо - если очень тщательно выставить соосность вектора тяги с осью планки, вращение прекращается., Уменьшается значительно но не прекращается, на этом видео аналогичная система и от стороны вращения маховика зависит в какую сторону вращается вся конструкция https://youtu.be/0LZ_sA-NRuc
Install the app
How to install the app on iOS
Follow along with the video below to see how to install our site as a web app on your home screen.
Примечание: This feature may not be available in some browsers.
Вы используете устаревший браузер. Этот и другие сайты могут отображаться в нем неправильно.
Необходимо обновить браузер или попробовать использовать другой.
Необходимо обновить браузер или попробовать использовать другой.
Разворачивающий момент.
S
slavka33bis
Из сообщения №зо - если очень тщательно выставить соосность вектора тяги с осью планки, вращение прекращается., Уменьшается значительно но не прекращается, на этом видео аналогичная система и от стороны вращения маховика зависит в какую сторону вращается вся конструкция https://youtu.be/0LZ_sA-NRuc
Николай, я конечно дико извиняюсь, но Вы попутали причинно-следственную связь.
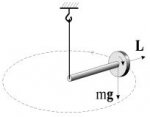
Для того, чтобы гироскоп, показанный на ролике, начал со своей штангой вращаться вокруг вертикальной оси необходимо, чтобы маховик имел возможность не просто свободно опускаться под действием своего веса, а ещё и наклоняться, изменяя положение оси вращения маховика в пространстве.
Если, допустим Вы, взяли бы в руку ту штангу с вращающимся маховиком, расположили бы штангу горизонтально, и просто отпустили бы её так, что бы она начала падать, то ни какого вращения относительно вертикальной оси штанга не получит.
Она просто начнёт падать, сохраняя параллельность своему первоначальному положению.
Прецессия возможно только в том случае, когда появляется гироскопический момент.
А гироскопический момент может появиться только тогда, когда ось вращения маховика начинает наклоняться.
Но если угловое положение оси маховика в пространстве не изменяется, то не будет ни гироскопического момента ни прецессии.
Ну да,интересный пример, представил, согласен, если вес штанги с вращающимся маховиком достаточный, и вся гироскопическая энергия направлена на удержания параллельности опираясь на одну точку - мою руку. а если удерживать рукой не за край штанги а за точку в центре тяжести, то высвободившаяся энергия начнет поворачивать штангу вокруг вертикальной оси. CУ у нас уравновешена, закреплена во всех плоскостях, самопроизвольно когда двигатель не работает не опущена вниз, гироскопическая энергия уводит нос аппарата вправо или влево в зависимости от стороны вращения винта... или как...
S
slavka33bis
а если удерживать рукой не за край штанги а за точку в центре тяжести, то высвободившаяся энергия начнет поворачивать штангу вокруг вертикальной оси.
Да от куда она (эта энергия) возьмётся-то?
Опять всё перепутали.
Я там имел ввиду именно то, что держать штангу вы должны были бы именно в центре масс системы.
После чего вы штангу бросаете.
Пока штанга находится в покое её ни что не заставит вращаться вокруг вертикальной оси.
Даже когда Вы начнёте опускать и поднимать руку так, что штанга будет оставаться параллельной первоначальному положению, то же ни какого вращения не будет.
Так как, нет ни какой силы, которая в такой ситуации стала бы вращать штангу с маховиком относительно вертикальной оси.
Но как только Вы попытаетесь наклонить штангу, Вы сразу получите и гиромомент и прецессию.
Чистый гиромомент будет только в том случае, когда ось наклона маховика совпадает с центром масс маховика (именно маховика, а не маховика со штангой. У маховика со штангой центр масс системы не совпадает с центром масс самого маховика. так как, штанга тоже имеет свой вес.).
Но как только ось наклона отодвигается от центра масс маховика, вместе с гиромоментом начнёт появляться и прецессия.
ПЫ.СЫ. Чёта как-то дискуссия о гироскопах начинает уже поднадоедать.
S
slavka33bis
гироскопическая энергия уводит нос аппарата вправо или влево в зависимости от стороны вращения винта.
Нос на том видеоролике уводит не какая-то там гироскопическая энергия, а смещённый вектор тяги винта.
ПЫ.СЫ. Чёта как-то дискуссия о гироскопах начинает уже поднадоедать.
S
slavka33bis
Судя по фотографии, самолётик очень лёгкий, и маховик его значительно перевешивает. Именно поэтому возникает его прецессия.
Если бы маховик действительно перевешивал самолётик, то на фото мы бы увидели то, что маховик опустился вниз до упора, а самолётик застыл бы вверху.
На самом деле центр масс системы в целом (самолётик, штанга и маховик) не совпадает с точкой опоры на стоечке, а находится немного ближе к самолётику.
Весь смысл этой игрушки как раз в том и состоит, что самолётик крутится вокруг стойки постепенно снижаясь к поверхности стола.
Он, типа, совершает мягкую посадка.
ПЫ.СЫ. Блин...
Всё, устал я...
Ничего Вам не понятно. Учите буквари.Понятно. Вся фишка в том, что ц.м. находится рядом с точкой опоры. Именно это и заставляет гироскоп прецессировать.
S
slavka33bis
Ничего Вам не понятно. Учите буквари.Понятно. Вся фишка в том, что ц.м. находится рядом с точкой опоры. Именно это и заставляет гироскоп прецессировать.
Не надо ни чего учить.
mdp-shnik всё понял правильно.
Несовпадение центра масс с точкой опоры позволяет центру масс свободно опускаться.
А при этом вся конструкция наклоняется, изменяя при этом угловое положение маховика в пространстве.
В результате чего маховик начинает прецессирующее вращение.
Просветите, как на самом деле. А то в букваре всё не понятно. Там Софья Ковалевская такого наваяла, что чёрт ногу сломит и ложный сустав образуется.Ничего Вам не понятно. Учите буквари.
И вообще, прокомментируйте свои слова: "для того чтоб система начала вращаться под действием прецессии, необходима неуравновешенная сила, стремящаяся отклонить ось маховика (винта)".
Я чувствую, что начинаю сомневаться в Вашей адекватности.
S
slavka33bis
Да, друзья, эта тема может лишить адекватности не одного авиатора 😀 😀 😀
Да ладно...
Тут и не такое лишало адекватности авиаторов.
Похоже, что "вместе с водой выплеснули и дитя".М-да. Похоже сенсация не состоится...
Если есть желание делать сенсации,- это одно, а если есть желание разобраться, то придётся потрудиться...
Гироскопические явления - весьма необычны и не имеют аналогов в привычной, повседневной практике. Потому, специфические свойства гироскопических устройств с трудом воспринимаются при первом ознакомлении и требуют привыкания и немалых мыслительных трудов для осознания основ теории.
Вот цитата с другой ветки:
У меня тоже самое, гироскопический момент старается увести вправо нос..все время соразмерно газа - давим левую ногу..
И на автожирах и на самолётах и паралётах это явление присутствует. Иногда в явно некомфортной форме, требующей компенсации. Иногда (при удачной компоновке силовой установки) практически не заметно. Особенно заметно влияние работы винтомоторной установки на курсовую устойчивость на аппаратах с балансирной системой управления (к которым относится и автожир).
В основе увода аппарата с курса (поворот носовой части) лежат две причины:*
*( Не учитывая влияния моментов, создаваемых несущей поверхностью или оперением)
- отклонение ЦМ от вертикали под действием реактивного момента в сочетании с направлением вектора тяги пропеллера. Эти факторы создают момент, разворачивающий конструкцию с толкающим винтом сонаправлено с вращением винта. Если пропеллер вращается по Часовой Стрелке (вправо) то конструкции сообщается момент относительно вертикальной оси, имеющей положительное направление вверх, так же по ЧС (вправо). Носовая часть конструкции имеет момент на разворот ВЛЕВО по направлению полёта. ;
- Влияние гироскопического момента, проявляющееся в прецессионном движении конструкции. Гироскопический момент возникает не только при маневрировании, но и от постоянно действующей «внешней силы» , в роли которой выступает сила тяги пропеллера. Сила тяги старается прокачнуть конструкцию, в результате появляется момент, заставляющий прецессировать (поворачиваться) в ортогональной плоскости. В рассмотрении гироскопических явлений используется правая тройка векторов, за положительное направление вращения принимается вращение по Часовой Стрелке (ЧС). Для простоты установления зависимости направления между «возбуждающим» моментом от силы тяги пропеллера и «реакцией» конструкции установим, что если пропеллер вращается по ЧС (вправо), то тележка с верхним подвесом будет поворачиваться носовой частью тоже ВПРАВО
Таким образом, сочетание этих двух взаимно компенсирующих моментов даёт три основных варианта:
1.- Разворачивающий ВЛЕВО момент от действия тяги пропеллера (на «плече», образованном смещением от реактивного момента) больше гироскопического момента. Конструкция будет разворачиваться (вращаться) ВЛЕВО.
2.- Разворачивающий ВЛЕВО момент от действия тяги пропеллера на плече смещения и момент от силы тяги пропеллера, «возбуждающий» гироскопический момент*, равны.
* (Относительно точки опоры, «возбуждающий» момент от силы тяги и гироскопический момент равны по величине).
3.- Разворачивающий ВПРАВО гироскопический момент (от действия силы тяги пропеллера, стремящейся прокачнуть конструкцию) больше момента силы тяги на плече смещения. Конструкция будет разворачиваться ВПРАВО (прецессировать).
Эти три варианта можно наблюдать в «статических» условиях установившегося движения или на упрощённых моделях, использующихся для опытов. Например, с чего началась эта ветка.
В варианте динамики и переходных процессов, указанные три варианта будут сочетаться всевозможными образами, особенно если учесть изменение силы тяги пропеллера и влияние внешних сил. Внешними силами, воздействующими на конструкцию и вызывающими «реакцию» на их действие будут силы инерции и аэродинамические силы.
Но, начинать изучение поведения этих увлекательных систем, конечно же, лучше с простых моделей. При этом соблюдать качественную юстировку и балансировку, чтобы не получать «артефакты» и неверные выводы.
Вот, выводы, которые иллюстрирует ранее описанный в одной из веток на форуме опыт с моторчиком на подвесе*:
*(Подробное описание и анализ этого опыта было перенесено модератором в ту же ветку из другого раздела и оказалось на тот момент заблокировано вместе с веткой)
1. Прецессия несимметричного ( «тяжёлого» ) гироскопа может быть вызвана не только внешней силой, имеющей механическую природу ( сила тяги пропеллера, давление потока воздуха ), но и инерциальными силами, которые пропорциональны массе тела и ускорению ( сила инерции, сила тяжести ).
2. Чем больше «плечо», на котором действует внешняя сила, тем меньше её величина требуется, чтобы создать одинаковый гироскопический момент ( угол отклонения ротора, величину угловой скорости прецессии )
3. В «жёстко» связанной гироскопической системе корпус – ротор ( не являющейся кардановым подвесом ) действия сил и моментов передаётся как в прямом, так и в обратном направлении. От корпуса – на ротор и от ротора – на корпус, вызывая изменение углового положения в пространстве ( поворот ).
4. Пространственное изменение углового положения ( поворот ) оси ротора несимметричного гироскопа, обыкновенно, не сопровождается изменением углового положения в пространстве «плеча» приложения внешней силы в плоскости действия момента этой силы.
5. Гироскоп ведёт себя аналогично угловому редуктору,- «передаёт» момент в направлении, ортогональном ( перпендикулярном ) «входящему» моменту.
Теперь, несколько соображений по цитатам, которые можно встретить в теме.
При этом, сначала, самолётик довольно продолжительное время, даже после начала ускорения следует строго на заданном «эшелоне». То есть, снижение начинается когда запас кинетической энергии в роторе практически мизерный и не способен компенсировать приростом окружной скорости потери кинетического момента собственно ротора.
Встречаются такие утверждения:
Но в контексте, что если нет изменения углового положения ротора, скажем, по тангажу, то не будет прецессии (вращения в ортогональной плоскости) или гироскопического момента в подвесе, что вызовет вращение системы (вместе с ротором) по курсу – это не верно.
Проще говоря, перемещения плоскости вращения ротора в направлении действия внешней силы (или момента) мы не можем наблюдать в принципе*. В то же время, именно под этим воздействием происходит вращение (прецессия) или возникает гироскопический момент. Прецессирует вся система вместе с маховиком – ротором, и всем, что к нему прикреплено.
*(Если существует возможность движения в направлении действия гироскопического момента или кинетическая энергия ротора больше или равна энергии внешнего воздействия)
Вообще, термин «прецессия» (вращение) правильно применять к несимметричным гироскопам – несбалансированным системам. Прецессия является результатом действия момента внешней силы на гироскоп. При этом, сама сила может быть любой природы.
Термин «гироскопический момент» используется применительно к симметричным гироскопам – сбалансированным системам, где его действие рассматривается в виде пары сил, возникающих в опорах подвеса.
Если наша конструкция с подвесом (аппарат с балансирным управлением) имеет значительный запас устойчивости по курсу и подвес достаточно жёсткий на кручение относительно аэродинамической поверхности, такие, что оказывают достаточное противодействие гироскопическому моменту и, как тележка относительно крыла, так и вся конструкция, сохраняют устойчивое направление в пространстве (по курсу), то ротор гироскопа (пропеллер и вращающиеся детали винтомотора) становится «гироскопическим стабилизатором». Он будет препятствовать изменению пространственного положения (как управляющим, так и возмущающим внешним воздействиям), создавая внутренние нагрузки в опорах от моментов гироскопических сил. В частности, при стремлении к увеличению тангажа тележки за счёт прокачки под действием силы тяги пропеллера, ротор – гироскоп будет препятствовать изменению тангажного угла. В повороте, так же будет стремиться сохранить направление по касательной к траектории. Такой конструкцией является самолёт. Влияние реактивного и гироскопического моментов на конструкцию и динамику полёта которого достаточно хорошо описаны в соответствующей литературе.
Вот картинки того же игрушечного «самолётика»:
Соответствующее описание к ним – по ссылке: http://www.teoretmeh.ru/dinamika9.htm
Не важно, что перевешивает – самолётик или маховичок. Наличие статической несбалансированности системы вызывает прецессию под действием внешней силы тяжести. Поэтому, тем, кто не обладал в детстве такими игрушками, с радостью сообщаю: Были и с «лёгким» и с «тяжёлым» самолётиками. Если самолётик легче гироскопа, то после раскрутки ротора шнурком и установки системы на опорную иглу он вращался, вращался, всё быстрее (обороты ротора падают) начинал набор высоты с ускорением вращения на выбеге ротора и, как бы «взмывал ввысь» с ускорением вращения при падении оборотов до совсем малых. При критическом падении оборотов гироскоп касался поверхности и, если не слетал с оси, то самолётик замирал в верхней точке. Если самолётик был тяжелее гироскопа, то он приземлялся на весьма возросшей скорости вращения, несколько раз подпрыгнув при касании «полосы».@ nikol1406
Я помню такую игрушку с детства. Но не помню, находится ли она в равновесии, когда маховик не крутится? Может, подскажете?
При этом, сначала, самолётик довольно продолжительное время, даже после начала ускорения следует строго на заданном «эшелоне». То есть, снижение начинается когда запас кинетической энергии в роторе практически мизерный и не способен компенсировать приростом окружной скорости потери кинетического момента собственно ротора.
Встречаются такие утверждения:
Но если плоскость вращения не находится в процессе изменения своего положения в пространстве, то ни какого гироскопического момента на винте возникать не будет.
Они верны в абсолютном смысле.Но если угловое положение оси маховика в пространстве не изменяется, то не будет ни гироскопического момента ни прецессии.
Но в контексте, что если нет изменения углового положения ротора, скажем, по тангажу, то не будет прецессии (вращения в ортогональной плоскости) или гироскопического момента в подвесе, что вызовет вращение системы (вместе с ротором) по курсу – это не верно.
Проще говоря, перемещения плоскости вращения ротора в направлении действия внешней силы (или момента) мы не можем наблюдать в принципе*. В то же время, именно под этим воздействием происходит вращение (прецессия) или возникает гироскопический момент. Прецессирует вся система вместе с маховиком – ротором, и всем, что к нему прикреплено.
*(Если существует возможность движения в направлении действия гироскопического момента или кинетическая энергия ротора больше или равна энергии внешнего воздействия)
Вообще, термин «прецессия» (вращение) правильно применять к несимметричным гироскопам – несбалансированным системам. Прецессия является результатом действия момента внешней силы на гироскоп. При этом, сама сила может быть любой природы.
Термин «гироскопический момент» используется применительно к симметричным гироскопам – сбалансированным системам, где его действие рассматривается в виде пары сил, возникающих в опорах подвеса.
Если наша конструкция с подвесом (аппарат с балансирным управлением) имеет значительный запас устойчивости по курсу и подвес достаточно жёсткий на кручение относительно аэродинамической поверхности, такие, что оказывают достаточное противодействие гироскопическому моменту и, как тележка относительно крыла, так и вся конструкция, сохраняют устойчивое направление в пространстве (по курсу), то ротор гироскопа (пропеллер и вращающиеся детали винтомотора) становится «гироскопическим стабилизатором». Он будет препятствовать изменению пространственного положения (как управляющим, так и возмущающим внешним воздействиям), создавая внутренние нагрузки в опорах от моментов гироскопических сил. В частности, при стремлении к увеличению тангажа тележки за счёт прокачки под действием силы тяги пропеллера, ротор – гироскоп будет препятствовать изменению тангажного угла. В повороте, так же будет стремиться сохранить направление по касательной к траектории. Такой конструкцией является самолёт. Влияние реактивного и гироскопического моментов на конструкцию и динамику полёта которого достаточно хорошо описаны в соответствующей литературе.
Вот картинки того же игрушечного «самолётика»:
Соответствующее описание к ним – по ссылке: http://www.teoretmeh.ru/dinamika9.htm
Вложения

S
slavka33bis
балансирной системой управления (к которым относится и автожир).
Управление у автожира такое же балансирное, как и у классического вертолёта!
- Откуда
- Брянская обл.
Похоже, что "вместе с водой выплеснули и дитя".
Теперь, несколько соображений по цитатам
:🙂 :🙂 :🙂
Я-то как раз трудился, и прежде чем делать выводы, проделал большое количество экспериментов, в отличие от присутствующих знатоков. Знать теорию гироскопа - это хорошо, но в данном случае она значения не имеет. Для проявления какого-либо гироскопического момента нужна как минимум одна неуравновешенная сила, действующая на ось маховика, мы же рассматриваем эффект, действующий постояно в состоянии покоя или равномерного прямолинейного движения.Если есть желание делать сенсации,- это одно, а если есть желание разобраться, то придётся потрудиться...
После цитируемого Вами сообщения работы продолжил, кое что выяснил, и могу заверить: гироскопические моменты не имеют отношения к обсуждаемому эффекту. Чуть позже выложу окончательное резюме.
S
slavka33bis
1) Но в контексте, что если нет изменения углового положения ротора, скажем, по тангажу, то не будет прецессии (вращения в ортогональной плоскости) или гироскопического момента в подвесе, что вызовет вращение системы (вместе с ротором) по курсу – это не верно.
2) Проще говоря, перемещения плоскости вращения ротора в направлении действия внешней силы (или момента) мы не можем наблюдать в принципе*. В то же время, именно под этим воздействием происходит вращение (прецессия) или возникает гироскопический момент.
Вот Вы утвердили в пункте "1", что "не верно", но в пункте "2" мало того, что не раскрыли почему именно не верно, но ещё и, в разрез с пунктом "1", согласились с моим утверждением.
Ведь Вы согласны же с тем, что для возникновения прецессии необходимо, что бы на систему из вне воздействовала какая-то сила (в случае с игрушкой - сила веса), которая начнёт изменять угловое положение оси вращения маховика в пространстве?
А от сюда следует то, что если этой силы нет и ось вращения маховика находится в покое, то не проявится ни гироскопический момент ни прецессия?
Кстати, Вы не раскрыли своего мнения о том, почему это мы не можем что-то наблюдать.
Similar threads
- Ответы
- 144
- Просмотры
- 18541
- Ответы
- 139
- Просмотры
- 10255
- Ответы
- 34
- Просмотры
- 4027
Поделиться: